Examples
Here are a selection of examples of Stone Soup features.
Classification
Control Models
Control Models: Inference with Linear Gaussian Control Model
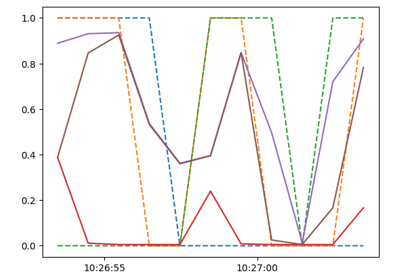
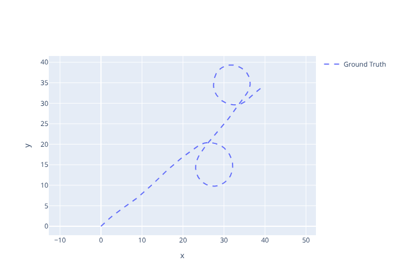
Data Association
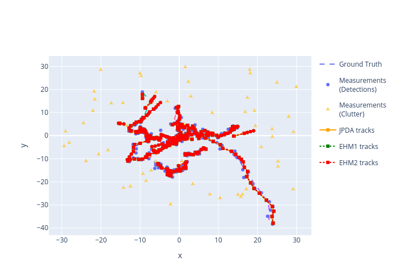
Comparing Efficient Hypothesis Management (EHM) with probability associators
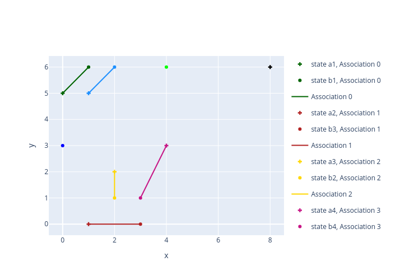
General Multi Hypotheses tracking implementation example
Extended Object Tracking
Filters
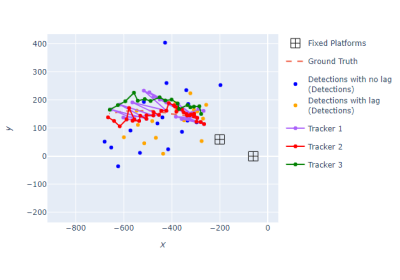
Comparing Multiple Trackers On Manoeuvring Targets
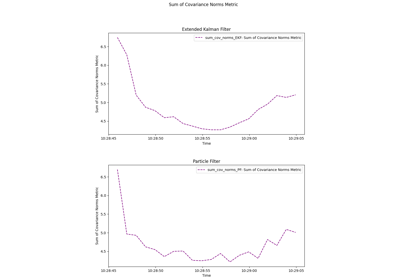
Metrics
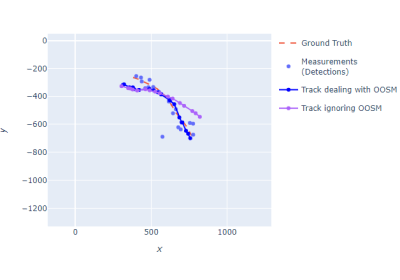
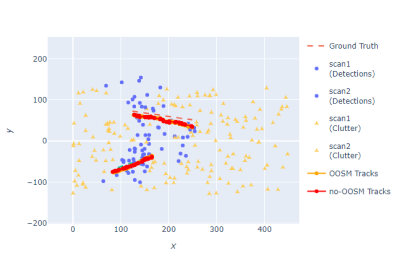
Out of Sequence Measurements
Particle filtering with Out-of-sequence Measurements
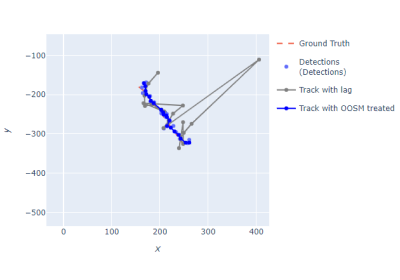
Dealing with Out-Of-Sequence Measurements with a fixed lag storage
Plotting
Readers
Road Networks
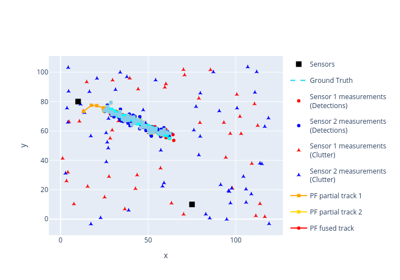
Sensor Fusion
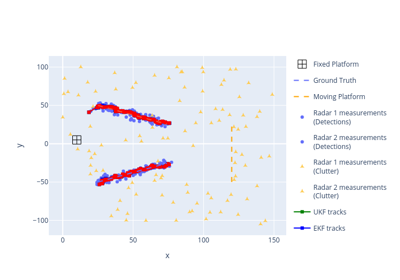
Performance comparison between Kalman and Particle Filters
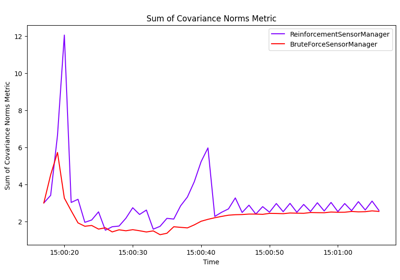
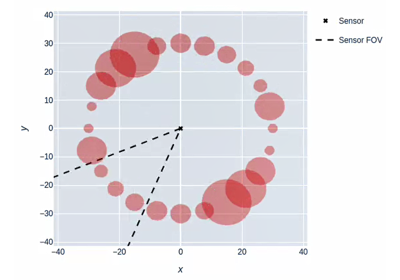
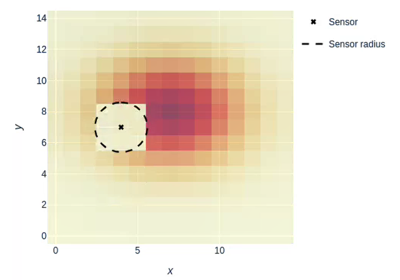
Sensor Management

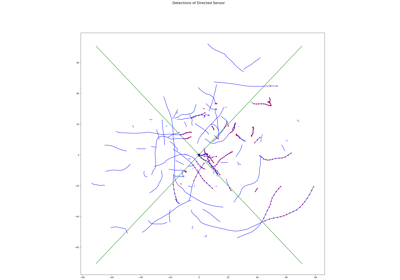
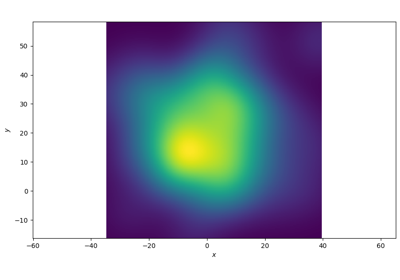
Monte Carlo Tree Search for Autonomous Source Term Estimation

Introduction to Bayesian Search - A Simple 1D Example
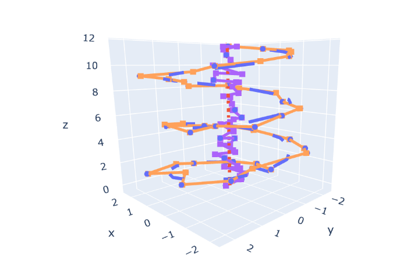
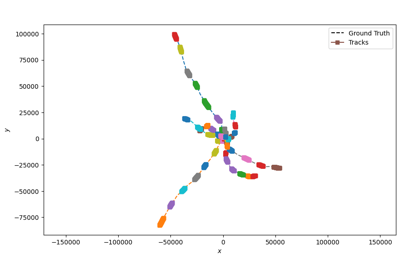
Simulation
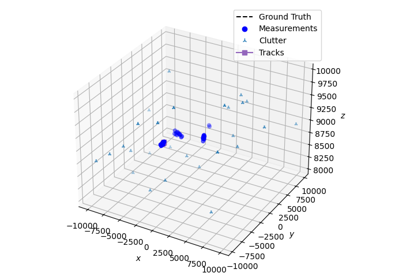
Multi-Target Tracking in 3D Using Platform Simulation
Using linearised ODEs from non-linear dynamic models in Stone Soup
Track Fusion
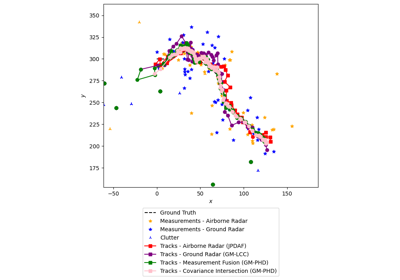
Multi-Sensor Fusion: Covariance Intersection Using Tracks as Measurements
Comparing different filters in the context of track fusion