Note
Click here to download the full example code or to run this example in your browser via Binder
Multi-Target Tracking in 3D Using Platform Simulation
In the Stone Soup library, simulations can be set up and run using special
FixedPlatform and Sensor objects. Simulated data can be preferable to
real data as the user has more control over the tracking scenario and real
data can be difficult or costly to acquire.
Creating the Sensor
We will begin by importing many relevant packages for the simulation.
from datetime import datetime
from datetime import timedelta
import numpy as np
import random
# Stone Soup imports:
from stonesoup.types.state import State, GaussianState
from stonesoup.types.array import StateVector, CovarianceMatrix
from stonesoup.models.transition.linear import (
CombinedLinearGaussianTransitionModel, ConstantVelocity)
from stonesoup.models.measurement.nonlinear import \
CartesianToElevationBearingRange
from stonesoup.deleter.time import UpdateTimeStepsDeleter
from stonesoup.tracker.simple import MultiTargetMixtureTracker
from matplotlib import pyplot as plt
We set the start time to be the moment when we begin the simulation; for simulations, the actual time doesn’t matter, only the time delta between the start and the point in question. We also set a random seed to ensure a standard outcome. At the end, you can try changing this value to see how the stochastic nature of the simulation and tracker can produce very different tracking scenarios with the same parameters.
start_time = datetime.now()
np.random.seed(783)
random.seed(783)
Create the Stationary Platform
Next, we will create a platform that will hold our radar sensor. In this case, the platform is stationary and located at the point (0, 0, 0), though in general it need not be.
Define the initial platform position, in this case the origin
platform_state_vector = StateVector([[0], [0], [0]])
position_mapping = (0, 1, 2)
Create the initial state (position, time). Notice that the time is set to the simulation start time defined earlier
Create our fixed platform
from stonesoup.platform.base import FixedPlatform
platform = FixedPlatform(
states=platform_state,
position_mapping=position_mapping
)
Create a Sensor
Now that our sensor platform has been created, we can create a sensor to attach to it. In this case, we will be using a radar that takes measurements of range, bearing, and elevation of the targets.
from stonesoup.sensor.radar.radar import RadarElevationBearingRange
from stonesoup.models.clutter import ClutterModel
First we create a covariance matrix which is a suitable measurement accuracy for the radar sensor. This radar measures range with an accuracy of +/- 25m, elevation accuracy +/- 0.15, degrees and bearing accuracy of +/- 0.15 degrees.
noise_covar = CovarianceMatrix(np.array(np.diag([np.deg2rad(0.15)**2,
np.deg2rad(0.15)**2,
25**2])))
The radar needs to be informed of where x, y, and z are in the target state space. In Stone Soup the states are often of the form [x, vx, y, vy, z, vz].
radar_mapping = (0, 2, 4)
A newer feature of the Stone Soup platform simulations are the ability to
generate clutter directly from the sensors using the ClutterModel
class. Using the clutter models, we can simulate realistic clutter
originating from the measurement model. Clutter is defined in the Cartesian
plane and converted to the correct measurement types according to the
sensor. We will now add a clutter model to the radar sensor. This clutter
model will use a uniform distribution over the defined ranges in each
dimension.
params = ((-10000, 10000), # clutter min x and max x
(-10000, 10000), # clutter min y and max y
(8000, 10000)) # clutter min z and max z
clutter_model = ClutterModel(
clutter_rate=0.5,
distribution=np.random.default_rng().uniform,
dist_params=params
)
Instantiate the radar and finally, attach the sensor to the stationary platform we defined above.
radar = RadarElevationBearingRange(
ndim_state=6,
position_mapping=radar_mapping,
noise_covar=noise_covar,
clutter_model=clutter_model
)
platform.add_sensor(radar)
Create the Simulation
For this example, we wish to have a simulation of multiple airborne targets.
We will use the MultiTargetGroundTruthSimulator class to simulate
the target paths, and then the PlatformDetectionSimulator class
to handle the radar simulation.
Set a constant velocity transition model for the targets
transition_model = CombinedLinearGaussianTransitionModel(
[ConstantVelocity(0.5), ConstantVelocity(0.5), ConstantVelocity(0.1)])
Define the Gaussian State from which new targets are sampled on initialisation
initial_target_state = GaussianState(
state_vector=StateVector([[0], [0], [0], [0], [9000], [0]]),
covar=CovarianceMatrix(np.diag([2000, 50, 2000, 50, 100, 1]))
)
And create the truth simulator for the targets
from stonesoup.simulator.simple import MultiTargetGroundTruthSimulator
groundtruth_sim = MultiTargetGroundTruthSimulator(
transition_model=transition_model, # target transition model
initial_state=initial_target_state, # add our initial state for targets
timestep=timedelta(seconds=1), # time between measurements
number_steps=120, # 2 minutes
birth_rate=0.05, # 5% chance of a new target being born every second
death_probability=0.05 # 5% chance of a target being killed
)
With our truth data generated and our sensor platform placed, we can now construct a simulator to generate measurements of the targets from each of the sensors in the simulation; in this case, just the stationary radar.
from stonesoup.simulator.platform import PlatformDetectionSimulator
sim = PlatformDetectionSimulator(
groundtruth=groundtruth_sim,
platforms=[platform]
)
Set Up the Tracking Algorithm
For this example, we will be using the JPDA algorithm to perform “soft” associations of the measurements to the targets. This is necessary as we have multiple airborne targets whose paths may intersect - a “hard” or “greedy” association algorithm such as the GNN may have issues in these cases.
First, we create a Kalman predictor using the transition model from the target simulation. In real situations, you may not know the actual transition model.
from stonesoup.predictor.kalman import KalmanPredictor
predictor = KalmanPredictor(transition_model)
Next, we define a measurement model for the Kalman updater. Here we have altered the noise covariance matrix slightly to make it harder for the tracker.
meas_covar = np.diag([np.deg2rad(0.5), np.deg2rad(0.15), 25])
meas_covar_trk = CovarianceMatrix(1.0*np.power(meas_covar, 2))
meas_model = CartesianToElevationBearingRange(
ndim_state=6,
mapping=(0, 2, 4),
noise_covar=meas_covar_trk
)
Using the measurement model, we make a Kalman updater which we will pass into our JPDA tracker.
from stonesoup.updater.kalman import ExtendedKalmanUpdater
updater = ExtendedKalmanUpdater(measurement_model=meas_model)
The hypothesiser will assume that there is a 95% chance to measure any given target at any given timestep. In real life, this probability is based on the SNR of the target signals. The clutter spatial density of the hypothesiser can be changed to check what happens when there is a mismatch between the estimated clutter rate and actual clutter rate.
from stonesoup.hypothesiser.probability import PDAHypothesiser
Pd = 0.95 # 95%
hypothesiser = PDAHypothesiser(predictor=predictor,
updater=updater,
clutter_spatial_density=0.5,
prob_detect=Pd)
Using the hypothesiser, we can make a data associator. Other MTT algorithms may use different association algorithms (like GNN)
from stonesoup.dataassociator.probability import JPDA
data_associator = JPDA(hypothesiser=hypothesiser)
We implement a simple deleter algorithm to delete tracks if no measurements have fallen within the JPDA gating region in 3 time steps.
deleter = UpdateTimeStepsDeleter(time_steps_since_update=3)
We will now set up a track initiator. In real life, targets may enter the measurement zone at any time during the collection period, and may leave at any point as well. To distinguish new targets from random clutter, we use a track initiator. This specific algorithm is a multi-measurement initiator; it utilises features of the tracker to initiate and hold tracks temporarily within the initiator itself, releasing them to the tracker once there are multiple detections associated with them enough to determine that they are “sure” tracks. In this case, the tracks are released after 3 appropriate detections in a row.
from stonesoup.initiator.simple import MultiMeasurementInitiator
from stonesoup.dataassociator.neighbour import NearestNeighbour
min_detections = 3 # number of detections required to begin a track
initiator_prior_state = GaussianState(
state_vector=np.array([[0], [0], [0], [0], [0], [0]]),
covar=np.diag([0, 10, 0, 10, 0, 10])**2
)
initiator_meas_model = CartesianToElevationBearingRange(
ndim_state=6,
mapping=np.array([0, 2, 4]),
noise_covar=noise_covar
)
initiator = MultiMeasurementInitiator(
prior_state=initiator_prior_state,
measurement_model=meas_model,
deleter=deleter,
data_associator=NearestNeighbour(hypothesiser),
updater=updater,
min_points=min_detections,
updates_only=True
)
Now we are ready to Create a JPDA multi-target tracker.
Run the Simulation and Tracker
Since the JPDA tracker holds the simulation variables, we can easily iterate through the tracker. Each time it will update the groundtruth simulation, generate detections using our fixed platform and radar, and run the tracking algorithm.
# Create lists to hold the information we want to plot later
tracks_plot = set()
tracks_id = set()
groundtruth_plot = set()
detections_plot = set()
# Run the simulation and tracker
for time, ctracks in JPDA_tracker:
print(time) # allows us to see the progress of the tracking simulation
for track in ctracks:
tracks_plot.add(track)
for truth in groundtruth_sim.current[1]:
groundtruth_plot.add(truth)
for detection in sim.detections:
detections_plot.add(detection)
2022-10-10 15:56:25.207209
2022-10-10 15:56:26.207209
2022-10-10 15:56:27.207209
2022-10-10 15:56:28.207209
2022-10-10 15:56:29.207209
2022-10-10 15:56:30.207209
2022-10-10 15:56:31.207209
2022-10-10 15:56:32.207209
2022-10-10 15:56:33.207209
2022-10-10 15:56:34.207209
2022-10-10 15:56:35.207209
2022-10-10 15:56:36.207209
2022-10-10 15:56:37.207209
2022-10-10 15:56:38.207209
2022-10-10 15:56:39.207209
2022-10-10 15:56:40.207209
2022-10-10 15:56:41.207209
2022-10-10 15:56:42.207209
2022-10-10 15:56:43.207209
2022-10-10 15:56:44.207209
2022-10-10 15:56:45.207209
2022-10-10 15:56:46.207209
2022-10-10 15:56:47.207209
2022-10-10 15:56:48.207209
2022-10-10 15:56:49.207209
2022-10-10 15:56:50.207209
2022-10-10 15:56:51.207209
2022-10-10 15:56:52.207209
2022-10-10 15:56:53.207209
2022-10-10 15:56:54.207209
2022-10-10 15:56:55.207209
2022-10-10 15:56:56.207209
2022-10-10 15:56:57.207209
2022-10-10 15:56:58.207209
2022-10-10 15:56:59.207209
2022-10-10 15:57:00.207209
2022-10-10 15:57:01.207209
2022-10-10 15:57:02.207209
2022-10-10 15:57:03.207209
2022-10-10 15:57:04.207209
2022-10-10 15:57:05.207209
2022-10-10 15:57:06.207209
2022-10-10 15:57:07.207209
2022-10-10 15:57:08.207209
2022-10-10 15:57:09.207209
2022-10-10 15:57:10.207209
2022-10-10 15:57:11.207209
2022-10-10 15:57:12.207209
2022-10-10 15:57:13.207209
2022-10-10 15:57:14.207209
2022-10-10 15:57:15.207209
2022-10-10 15:57:16.207209
2022-10-10 15:57:17.207209
2022-10-10 15:57:18.207209
2022-10-10 15:57:19.207209
2022-10-10 15:57:20.207209
2022-10-10 15:57:21.207209
2022-10-10 15:57:22.207209
2022-10-10 15:57:23.207209
2022-10-10 15:57:24.207209
2022-10-10 15:57:25.207209
2022-10-10 15:57:26.207209
2022-10-10 15:57:27.207209
2022-10-10 15:57:28.207209
2022-10-10 15:57:29.207209
2022-10-10 15:57:30.207209
2022-10-10 15:57:31.207209
2022-10-10 15:57:32.207209
2022-10-10 15:57:33.207209
2022-10-10 15:57:34.207209
2022-10-10 15:57:35.207209
2022-10-10 15:57:36.207209
2022-10-10 15:57:37.207209
2022-10-10 15:57:38.207209
2022-10-10 15:57:39.207209
2022-10-10 15:57:40.207209
2022-10-10 15:57:41.207209
2022-10-10 15:57:42.207209
2022-10-10 15:57:43.207209
2022-10-10 15:57:44.207209
2022-10-10 15:57:45.207209
2022-10-10 15:57:46.207209
2022-10-10 15:57:47.207209
2022-10-10 15:57:48.207209
2022-10-10 15:57:49.207209
2022-10-10 15:57:50.207209
2022-10-10 15:57:51.207209
2022-10-10 15:57:52.207209
2022-10-10 15:57:53.207209
2022-10-10 15:57:54.207209
2022-10-10 15:57:55.207209
2022-10-10 15:57:56.207209
2022-10-10 15:57:57.207209
2022-10-10 15:57:58.207209
2022-10-10 15:57:59.207209
2022-10-10 15:58:00.207209
2022-10-10 15:58:01.207209
2022-10-10 15:58:02.207209
2022-10-10 15:58:03.207209
2022-10-10 15:58:04.207209
2022-10-10 15:58:05.207209
2022-10-10 15:58:06.207209
2022-10-10 15:58:07.207209
2022-10-10 15:58:08.207209
2022-10-10 15:58:09.207209
2022-10-10 15:58:10.207209
2022-10-10 15:58:11.207209
2022-10-10 15:58:12.207209
2022-10-10 15:58:13.207209
2022-10-10 15:58:14.207209
2022-10-10 15:58:15.207209
2022-10-10 15:58:16.207209
2022-10-10 15:58:17.207209
2022-10-10 15:58:18.207209
2022-10-10 15:58:19.207209
2022-10-10 15:58:20.207209
2022-10-10 15:58:21.207209
2022-10-10 15:58:22.207209
2022-10-10 15:58:23.207209
2022-10-10 15:58:24.207209
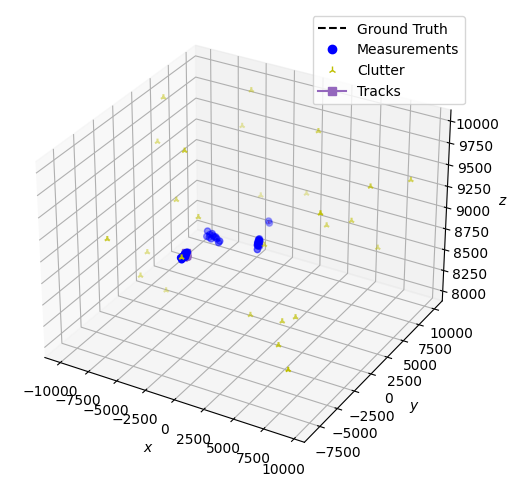
Plot the Results
Now that all of the relevant information has been extracted, the results can
be plotted using the 3D plotting functionality provided by the
Plotter class.
from stonesoup.plotter import Plotter, Dimension
plotter = Plotter(Dimension.THREE)
plotter.plot_ground_truths(groundtruth_plot, [0, 2, 4])
plotter.plot_measurements(detections_plot, [0, 2, 4])
plotter.plot_tracks(tracks_plot, [0, 2, 4], uncertainty=False, err_freq=5)
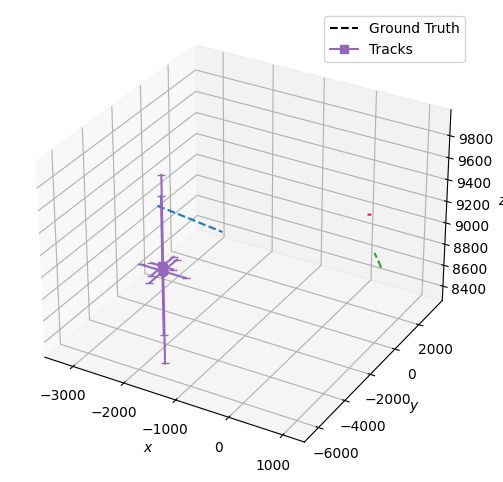
We will also make a plot without measurements/clutter to better see the tracks.
plotter2 = Plotter(Dimension.THREE)
plotter2.plot_ground_truths(groundtruth_plot, [0, 2, 4])
plotter2.plot_tracks(tracks_plot, [0, 2, 4], uncertainty=True, err_freq=5)
Metrics
To analyse the tracker performance, we will use the OSPA, SIAP, and uncertainty metrics. For each of these metrics, we make a generator object which gets put into a metric manager.
# OSPA metric
from stonesoup.metricgenerator.ospametric import OSPAMetric
ospa_generator = OSPAMetric(c=40, p=1)
# SIAP metrics
from stonesoup.metricgenerator.tracktotruthmetrics import SIAPMetrics
from stonesoup.measures import Euclidean
SIAPpos_measure = Euclidean(mapping=np.array([0, 2]))
SIAPvel_measure = Euclidean(mapping=np.array([1, 3]))
siap_generator = SIAPMetrics(
position_measure=SIAPpos_measure,
velocity_measure=SIAPvel_measure
)
# Uncertainty metric
from stonesoup.metricgenerator.uncertaintymetric import \
SumofCovarianceNormsMetric
uncertainty_generator = SumofCovarianceNormsMetric()
The metric manager requires us to define an associator. Here we want to compare the track estimates with the ground truth.
from stonesoup.dataassociator.tracktotrack import TrackToTruth
associator = TrackToTruth(association_threshold=30)
from stonesoup.metricgenerator.manager import SimpleManager
metric_manager = SimpleManager(
[ospa_generator, siap_generator, uncertainty_generator],
associator=associator
)
Since we saved the groundtruth and tracks before, we can easily add them to the metric manager now, and then tell it to generate the metrics.
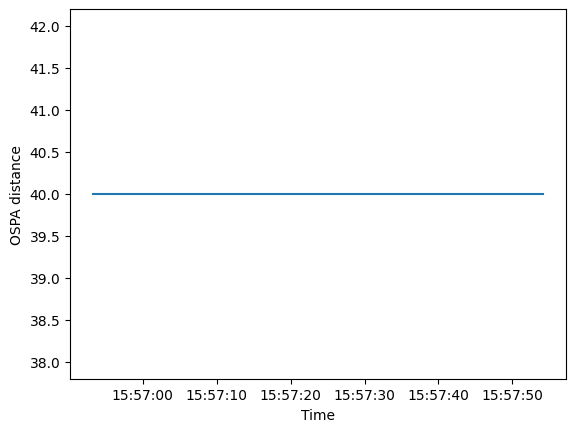
The first metric we will look at is the OSPA metric.
ospa_metric = metrics["OSPA distances"]
fig, ax = plt.subplots()
ax.plot([i.timestamp for i in ospa_metric.value],
[i.value for i in ospa_metric.value])
ax.set_ylabel("OSPA distance")
_ = ax.set_xlabel("Time")
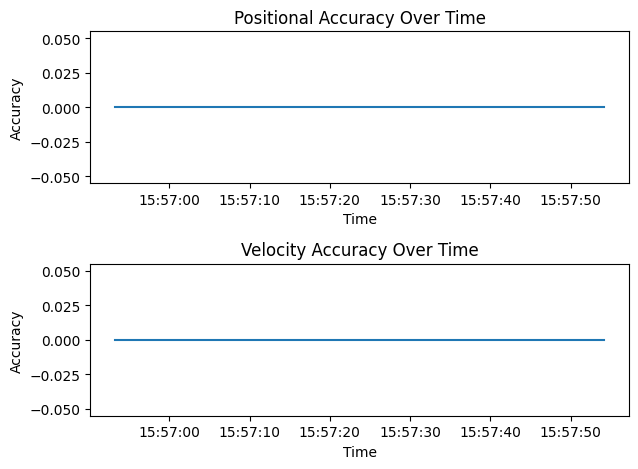
Next are the SIAP metrics. Specifically, we will look at the position and velocity accuracy.
position_accuracy = metrics['SIAP Position Accuracy at times']
velocity_accuracy = metrics['SIAP Velocity Accuracy at times']
times = metric_manager.list_timestamps()
# Make a figure with 2 subplots.
fig, axes = plt.subplots(2)
# The first subplot will show the position accuracy
axes[0].set(title='Positional Accuracy Over Time', xlabel='Time',
ylabel='Accuracy')
axes[0].plot(times, [metric.value for metric in position_accuracy.value])
# The second subplot will show the velocity accuracy
axes[1].set(title='Velocity Accuracy Over Time', xlabel='Time',
ylabel='Accuracy')
axes[1].plot(times, [metric.value for metric in velocity_accuracy.value])
plt.tight_layout()
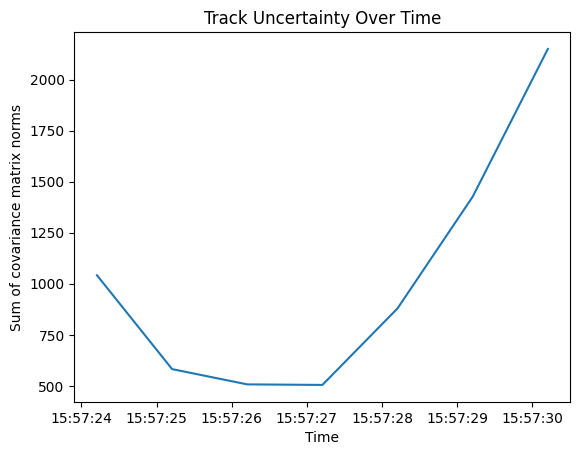
Finally, we will examine a general uncertainty metric. This is calculated as the sum of the norms of the covariance matrices of each estimated state. Since the sum is not normalized for the number of estimated states, it is most important to look at the trends of this graph rather than the values.
uncertainty_metric = metrics["Sum of Covariance Norms Metric"]
fig, ax = plt.subplots()
ax.plot([i.timestamp for i in uncertainty_metric.value],
[i.value for i in uncertainty_metric.value])
_ = ax.set(title="Track Uncertainty Over Time", xlabel="Time",
ylabel="Sum of covariance matrix norms")
Total running time of the script: ( 0 minutes 2.544 seconds)