Note
Click here to download the full example code or to run this example in your browser via Binder
9 - Initiators & Deleters¶
So far we have provided a prior in all our examples, defining where we think our tracks will start. This has also been for a fixed number of tracks. In practice, targets may appear and disappear all the time. This could be because they enter/exit the sensor’s field of view. The location/state of the targets’ birth may also be unknown and varying.
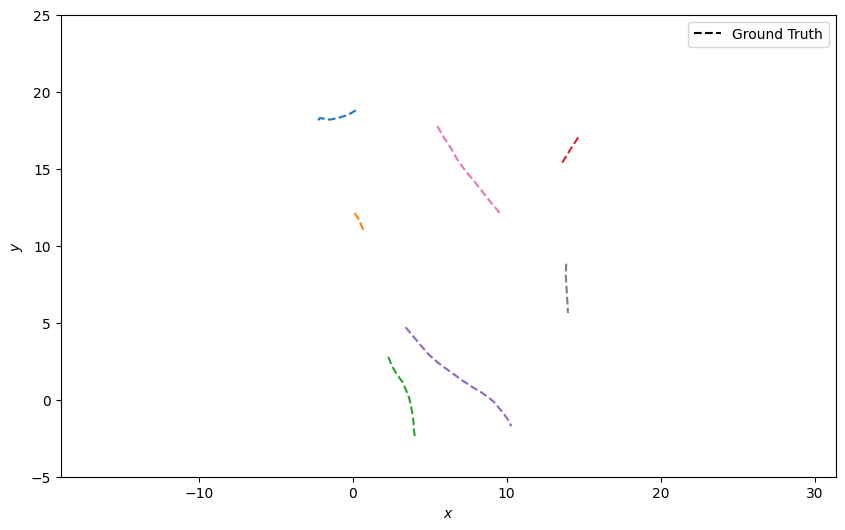
Simulating multiple targets¶
Here we’ll simulate multiple targets moving at a constant velocity. A Poisson distribution will be used to sample the number of new targets which are born at a particular timestep, and a simple draw from a uniform distribution will be used to decide if a target will be removed. Each target will have a random position and velocity on birth.
from datetime import datetime
from datetime import timedelta
import numpy as np
from stonesoup.models.transition.linear import CombinedLinearGaussianTransitionModel, \
ConstantVelocity
from stonesoup.types.groundtruth import GroundTruthPath, GroundTruthState
np.random.seed(1991)
start_time = datetime.now()
truths = set() # Truths across all time
current_truths = set() # Truths alive at current time
transition_model = CombinedLinearGaussianTransitionModel([ConstantVelocity(0.005),
ConstantVelocity(0.005)])
for k in range(20):
# Death
for truth in current_truths.copy():
if np.random.rand() <= 0.05: # Death probability
current_truths.remove(truth)
# Update truths
for truth in current_truths:
truth.append(GroundTruthState(
transition_model.function(truth[-1], noise=True, time_interval=timedelta(seconds=1)),
timestamp=start_time + timedelta(seconds=k)))
# Birth
for _ in range(np.random.poisson(0.6)): # Birth probability
x, y = initial_position = np.random.rand(2) * [20, 20] # Range [0, 20] for x and y
x_vel, y_vel = (np.random.rand(2))*2 - 1 # Range [-1, 1] for x and y velocity
state = GroundTruthState([x, x_vel, y, y_vel], timestamp=start_time + timedelta(seconds=k))
# Add to truth set for current and for all timestamps
truth = GroundTruthPath([state])
current_truths.add(truth)
truths.add(truth)
from stonesoup.plotter import Plotter
plotter = Plotter()
plotter.ax.set_ylim(-5, 25)
plotter.plot_ground_truths(truths, [0, 2])
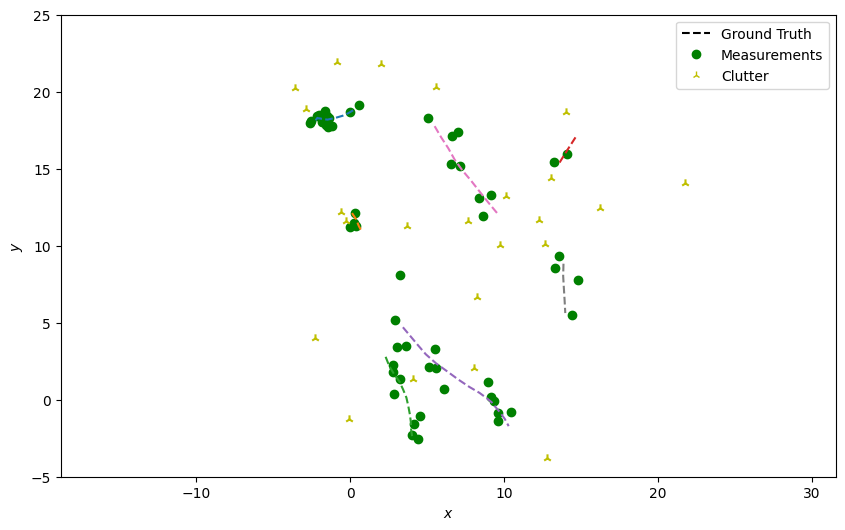
Generate Detections and Clutter¶
Next, generate detections with clutter just as in the previous tutorials, skipping over the truth paths that weren’t alive at the current time step.
from scipy.stats import uniform
from stonesoup.types.detection import TrueDetection
from stonesoup.types.detection import Clutter
from stonesoup.models.measurement.linear import LinearGaussian
measurement_model = LinearGaussian(
ndim_state=4,
mapping=(0, 2),
noise_covar=np.array([[0.25, 0],
[0, 0.25]])
)
all_measurements = []
for k in range(20):
measurement_set = set()
timestamp = start_time + timedelta(seconds=k)
for truth in truths:
try:
truth_state = truth[timestamp]
except IndexError:
# This truth not alive at this time.
continue
# Generate actual detection from the state with a 10% chance that no detection is received.
if np.random.rand() <= 0.9:
# Generate actual detection from the state
measurement = measurement_model.function(truth_state, noise=True)
measurement_set.add(TrueDetection(state_vector=measurement,
groundtruth_path=truth,
timestamp=truth_state.timestamp,
measurement_model=measurement_model))
# Generate clutter at this time-step
truth_x = truth_state.state_vector[0]
truth_y = truth_state.state_vector[2]
for _ in range(np.random.randint(2)):
x = uniform.rvs(truth_x - 10, 20)
y = uniform.rvs(truth_y - 10, 20)
measurement_set.add(Clutter(np.array([[x], [y]]), timestamp=timestamp,
measurement_model=measurement_model))
all_measurements.append(measurement_set)
# Plot true detections and clutter.
plotter.plot_measurements(all_measurements, [0, 2], color='g')
plotter.fig
Creating a Tracker¶
We’ll now create the tracker components as we did with the multi-target examples previously.
from stonesoup.predictor.kalman import KalmanPredictor
predictor = KalmanPredictor(transition_model)
from stonesoup.updater.kalman import KalmanUpdater
updater = KalmanUpdater(measurement_model)
from stonesoup.hypothesiser.distance import DistanceHypothesiser
from stonesoup.measures import Mahalanobis
hypothesiser = DistanceHypothesiser(predictor, updater, measure=Mahalanobis(), missed_distance=3)
from stonesoup.dataassociator.neighbour import GNNWith2DAssignment
data_associator = GNNWith2DAssignment(hypothesiser)
Creating a Deleter¶
Here we are going to create an error based deleter, which will delete any Track where
trace of the covariance is over a certain threshold, i.e. when we have a high uncertainty. This
simply requires a threshold to be defined, which will depend on units and number of dimensions of
your state vector. So the higher the threshold value, the longer tracks that haven’t been
updated will remain.
from stonesoup.deleter.error import CovarianceBasedDeleter
deleter = CovarianceBasedDeleter(covar_trace_thresh=4)
Creating an Initiator¶
Here we are going to use a measurement based initiator, which will create a track from the
unassociated Detection objects. A prior needs to be defined for the entire state
but elements of the state that are measured are replaced by state of the measurement, including
the measurement’s uncertainty (noise covariance defined by the MeasurementModel). In
this example, as our sensor measures position (as defined in measurement model
mapping attribute earlier), we only need to modify the values for the
velocity and its variance.
As we are dealing with clutter, here we are going to be using a multi-measurement initiator. This requires that multiple measurements are added to a track before being initiated. In this example, this initiator effectively runs a mini version of the same tracker, but you could use different components.
from stonesoup.types.state import GaussianState
from stonesoup.initiator.simple import MultiMeasurementInitiator
initiator = MultiMeasurementInitiator(
prior_state=GaussianState([[0], [0], [0], [0]], np.diag([0, 1, 0, 1])),
measurement_model=measurement_model,
deleter=deleter,
data_associator=data_associator,
updater=updater,
min_points=2,
)
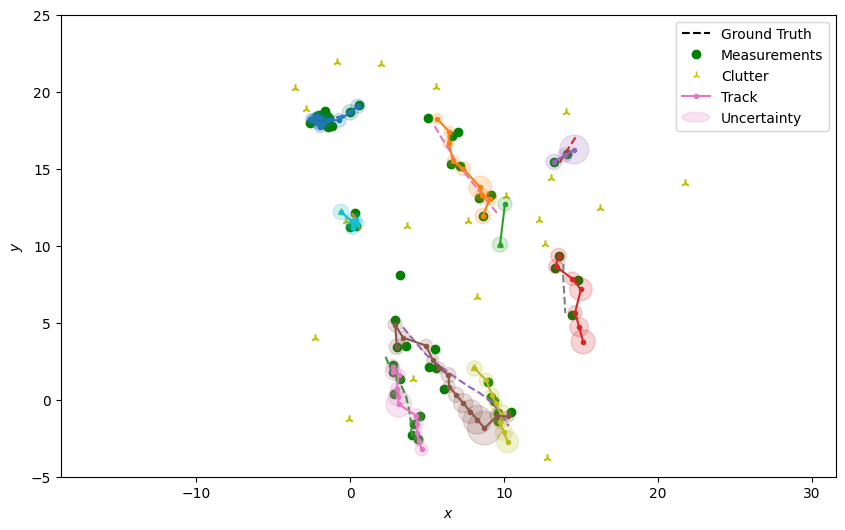
Running the Tracker¶
Loop through the predict, hypothesise, associate and update steps like before, but note on update
which detections we’ve used at each time step. In each loop the deleter is called, returning
tracks that are to be removed. Then the initiator is called with the unassociated detections, by
removing the associated detections from the full set. The order of the deletion and initiation is
important, so tracks that have just been created, aren’t deleted straight away. (The
implementation below is the same as MultiTargetTracker)
tracks = set()
for n, measurements in enumerate(all_measurements):
# Calculate all hypothesis pairs and associate the elements in the best subset to the tracks.
hypotheses = data_associator.associate(tracks,
measurements,
start_time + timedelta(seconds=n))
associated_measurements = set()
for track in tracks:
hypothesis = hypotheses[track]
if hypothesis.measurement:
post = updater.update(hypothesis)
track.append(post)
associated_measurements.add(hypothesis.measurement)
else: # When data associator says no detections are good enough, we'll keep the prediction
track.append(hypothesis.prediction)
# Carry out deletion and initiation
tracks -= deleter.delete_tracks(tracks)
tracks |= initiator.initiate(measurements - associated_measurements,
start_time + timedelta(seconds=n))
Plot the resulting tracks.
plotter.plot_tracks(tracks, [0, 2], uncertainty=True)
plotter.fig
Total running time of the script: ( 0 minutes 1.893 seconds)