Note
Go to the end to download the full example code or to run this example in your browser via Binder.
Areas of interest based Reward Function
This notebook introduces sensor management which factors in environmental information related to the location the sensor is operating in.
We use the AreaOfInterest object, which has functionality for setting levels
of “interest” within defined x, y boundaries, and the AOIAccessRewardFunction
to define different behaviour for the sensor platform by switching between different
reward functions.
Here we will define three areas with different levels of interest, to simulate a scenario where the sensor platform gets closer to the target to make observations as the target moves into a higher interest area.
Setting Up the Scenario
First we generate a ground truth of a target following a constant velocity with some noise and plot this.
import numpy as np
from datetime import datetime, timedelta
from stonesoup.models.transition.linear import (CombinedLinearGaussianTransitionModel,
ConstantVelocity)
from stonesoup.types.groundtruth import GroundTruthPath, GroundTruthState
np.random.seed(1990)
start_time = datetime.now().replace(second=0, microsecond=0)
transition_model = CombinedLinearGaussianTransitionModel(
[ConstantVelocity(10), ConstantVelocity(10)])
truths = []
truth = GroundTruthPath([GroundTruthState([-450, 5, 450, -5], timestamp=start_time)])
duration = 120
timesteps = [start_time]
for k in range(1, duration):
timesteps.append(start_time+timedelta(seconds=k))
truth.append(GroundTruthState(
transition_model.function(truth[k-1], noise=True, time_interval=timedelta(seconds=1)),
timestamp=timesteps[k]))
truths.append(truth)
from stonesoup.plotter import AnimatedPlotterly
plotter = AnimatedPlotterly(timesteps, tail_length=1)
plotter.plot_ground_truths(truth, [0, 2])
plotter.fig
Creating the Platform and Sensor
Next we create the taskable sensor platform and attach a
RadarRotatingBearingRange sensor. We also
create a target sensor, for the purpose of modelling the target’s field of
view, for use in the FOVInteractionRewardFunction.
from stonesoup.platform import MovingPlatform
from stonesoup.movable.max_speed import MaxSpeedActionableMovable
from stonesoup.sensor.radar.radar import RadarRotatingBearingRange
from stonesoup.types.angle import Angle
from stonesoup.types.state import State, StateVector
sensor = RadarRotatingBearingRange(
position_mapping=(0, 2),
noise_covar=np.array([[np.radians(5)**2, 0],
[0, 20**2]]),
ndim_state=4,
rpm=30,
fov_angle=np.radians(360),
dwell_centre=StateVector([np.radians(0)]),
max_range=300,
resolution=Angle(np.radians(360)))
target_sensor = RadarRotatingBearingRange(
position_mapping=(0, 2),
noise_covar=np.array([[np.radians(1)**2, 0], [0, 1**2]]),
ndim_state=4,
rpm=30,
fov_angle=np.radians(360),
dwell_centre=StateVector([np.radians(90)]),
max_range=100,
resolution=Angle(np.radians(180)))
platform = MovingPlatform(
movement_controller=MaxSpeedActionableMovable(
states=[State([-500, 700],
timestamp=start_time)],
position_mapping=(0, 1),
action_mapping=(0, 1),
resolution=10,
angle_resolution=np.pi/2,
max_speed=100),
sensors=[sensor])
Creating a Predictor and Updater
Next we need some tracking components: a predictor and an updater.
from stonesoup.predictor.kalman import KalmanPredictor
predictor = KalmanPredictor(transition_model)
from stonesoup.updater.kalman import ExtendedKalmanUpdater
updater = ExtendedKalmanUpdater(measurement_model=None)
Creating Areas of Interest
Different areas of interest can be defined by setting minimum/maximum values for x
and y using the AreaOfInterest. Here we have 3 areas of different
levels of interest.
Area 1 is defined as being everything to the left of the origin (x = 0), with an interest level of 4. Area 2 is defined as being between x = 0 and x = 1500, with an interest level of 7. Area 3 is defined as being everything to the right of x = 1500, with an interest level of 10.
from stonesoup.types.shape import AreaOfInterest
area1 = AreaOfInterest(xmax=0, interest=4)
area2 = AreaOfInterest(xmin=0, xmax=1500, interest=7)
area3 = AreaOfInterest(xmin=1500, interest=10)
Creating a Sensor Manager
Now we create a sensor manager, providing it with the sensor, the sensor platform, and a reward function.
We define a different reward function for each area of interest.
In areas of low interest we use a combination of the FOVInteractionRewardFunction
and the UncertaintyRewardFunction, ensuring the sensor platform stays outside a
set distance from the target while continuing to track it.
In areas of medium interest this distance
is reduced, and in areas of high interest the FOVInteractionRewardFunction is
not used, so the sensor platform can get as close as it likes.
The AOIAccessRewardFunction is used to switch between these reward functions as the
target moves through the different areas of interest, based on the target’s location and the
defined interest thresholds for each area.
from stonesoup.sensormanager.reward import (
UncertaintyRewardFunction, MultiplicativeRewardFunction, FOVInteractionRewardFunction,
AOIRewardFunction2D)
from stonesoup.sensormanager.base import BruteForceSensorManager
reward_func_A = UncertaintyRewardFunction(predictor, updater)
reward_func_B = FOVInteractionRewardFunction(
predictor, updater, sensor_fov_radius=sensor.max_range,
target_fov_radius=target_sensor.max_range + 100,
fov_scale=1)
reward_func_C = FOVInteractionRewardFunction(
predictor, updater, sensor_fov_radius=sensor.max_range,
target_fov_radius=target_sensor.max_range,
fov_scale=0.75)
reward_func_AB = MultiplicativeRewardFunction([reward_func_A, reward_func_B])
reward_func_AC = MultiplicativeRewardFunction([reward_func_A, reward_func_C])
reward_func_aoi = AOIRewardFunction2D(default_reward=reward_func_AC,
interest_thresholds={3: reward_func_AB,
5: reward_func_AC,
9: reward_func_A},
areas=[area1, area2, area3],
target_mapping=[0, 2])
sensormanager = BruteForceSensorManager(sensors={sensor},
platforms={platform},
reward_function=reward_func_aoi,)
Creating a Tracker
Next we initialise a track and build a tracker.
from stonesoup.types.state import GaussianState
from stonesoup.types.track import Track
prior = GaussianState(truths[0][0].state_vector,
covar=np.diag([0.5, 0.5, 0.5, 0.5] + np.random.normal(0, 5e-4, 4)),
timestamp=start_time)
tracks = {Track([prior])}
from stonesoup.hypothesiser.distance import DistanceHypothesiser
from stonesoup.measures import Mahalanobis
hypothesiser = DistanceHypothesiser(predictor, updater, measure=Mahalanobis(), missed_distance=5)
from stonesoup.dataassociator.neighbour import GNNWith2DAssignment
data_associator = GNNWith2DAssignment(hypothesiser)
Running the Tracking Loop
At each timestep the sensor manager generates the optimal actions for our sensor and platform. These actions are taken before the sensor makes detections and the track is updated.
from ordered_set import OrderedSet
from collections import defaultdict
import copy
from stonesoup.measures import Euclidean
from stonesoup.sensor.sensor import Sensor
all_measurements = set()
sensor_history = defaultdict(dict)
for timestep in timesteps[1:]:
chosen_actions = sensormanager.choose_actions(tracks, timestep)
measurements = set()
for chosen_action in chosen_actions:
for actionable, actions in chosen_action.items():
actionable.add_actions(actions)
actionable.act(timestep)
if isinstance(actionable, Sensor):
measurements |= actionable.measure(OrderedSet(truth[timestep] for truth in truths),
noise=True)
all_measurements.update(measurements)
sensor_history[timestep][sensor] = copy.deepcopy(sensor)
hypotheses = data_associator.associate(tracks, measurements, timestep)
for track in tracks:
hypothesis = hypotheses[track]
if hypothesis.measurement:
post = updater.update(hypothesis)
track.append(post)
else:
track.append(hypothesis.prediction)
Plotting
Now we use the animated plotter to see what behaviour has been achieved.
import plotly.graph_objects as go
from stonesoup.platform.base import PathBasedPlatform
plotter = AnimatedPlotterly(timesteps, tail_length=0.1)
plotter.plot_ground_truths(truths, [0, 2], mode='lines', line=dict(dash=None))
plotter.plot_tracks(tracks, mapping=(0, 2))
plotter.plot_measurements(all_measurements, mapping=(0, 2))
track_list = list(tracks)
target_platform = PathBasedPlatform(path=track_list[0], sensors=[target_sensor],
position_mapping=[0, 2])
target_sensor_history = defaultdict(dict)
for timestep in timesteps[1:]:
target_platform.move(timestep)
target_sensor_history[timestep][target_sensor] = copy.deepcopy(target_sensor)
target_sensor_set = {target_sensor}
sensor_set = {sensor}
plotter.plot_sensor_fov(sensor_set, sensor_history)
plotter.plot_sensor_fov(target_sensor_set, target_sensor_history, label="Target FOV", colour="red")
plotter.fig.add_trace(go.Scatter(x=[1500, 1500], y=[-300, 500], mode='lines',
line=dict(color='#888'),
name='Area Boundaries',
showlegend=False))
plotter.fig.add_trace(go.Scatter(x=[0, 0], y=[-300, 500], mode='lines',
line=dict(color='#888'),
name='Area Boundaries',
showlegend=False))
plotter.fig.add_trace(go.Scatter(x=[-400, 800, 2000],
y=[0, 0, 0], mode="text", name="Areas of Interest",
line=dict(color='#888'),
text=["Interest: 4",
"Interest: 7",
"Interest: 10"]))
plotter.fig
The actionable platform is able to follow the target as it moves across the action space, initially remaining outside the distance set for areas of low interest, then getting closer as it moves into areas of higher interest.
This is a relatively simple example but demonstrates how the sensor manager can switch reward function, and therefore change behaviour, based on information about its environment.
Metrics
To check the impact this has on the tracking performance we compute some metrics.
from stonesoup.metricgenerator.ospametric import OSPAMetric
ospa_generatorA = OSPAMetric(c=40, p=1,
generator_name='3 areas of interest',
tracks_key='tracksA',
truths_key='truths')
from stonesoup.metricgenerator.tracktotruthmetrics import SIAPMetrics
siap_generatorA = SIAPMetrics(position_measure=Euclidean((0, 2)),
velocity_measure=Euclidean((1, 3)),
generator_name='3 areas of interest',
tracks_key='tracksA',
truths_key='truths')
from stonesoup.dataassociator.tracktotrack import TrackToTruth
associator = TrackToTruth(association_threshold=30)
from stonesoup.metricgenerator.uncertaintymetric import SumofCovarianceNormsMetric
uncertainty_generatorA = SumofCovarianceNormsMetric(generator_name='3 areas of interest',
tracks_key='tracksA')
from stonesoup.metricgenerator.manager import MultiManager
metric_manager = MultiManager([ospa_generatorA,
siap_generatorA,
uncertainty_generatorA],
associator=associator)
metric_manager.add_data({'truths': truths, 'tracksA': tracks})
metrics = metric_manager.generate_metrics()
First we plot Sum of Covariance Norms metric.
from stonesoup.plotter import MetricPlotter
fig1 = MetricPlotter()
fig1.plot_metrics(metrics, metric_names=['Sum of Covariance Norms Metric'])
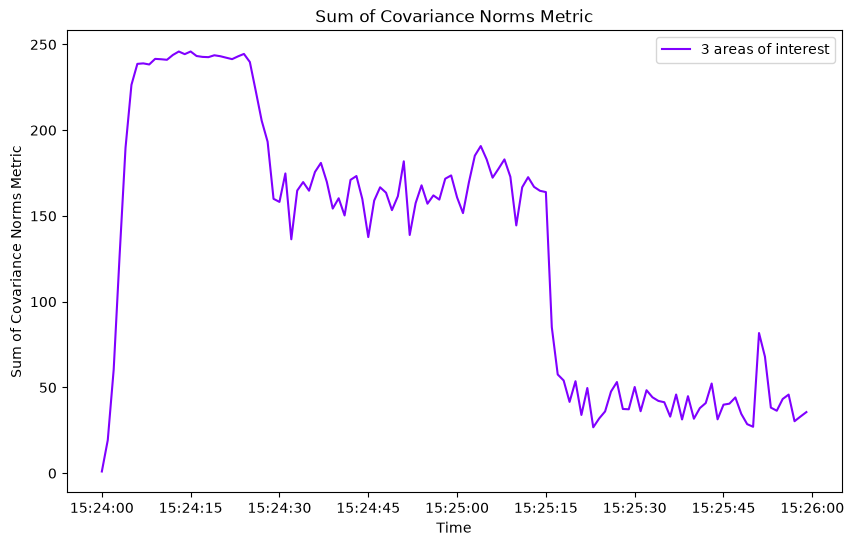
We can see from this that initially, when the sensor platform is staying further from the target, the track uncertainty is higher, and as it moves into an area of high interest, it gets closer to the target and the track uncertainty reduces.
Next we plot the OSPA and SIAP metrics
fig2 = MetricPlotter()
fig2.plot_metrics(metrics, metric_names=['OSPA distances'])
fig3 = MetricPlotter()
fig3.plot_metrics(metrics, metric_names=['SIAP Position Accuracy at times',
'SIAP Velocity Accuracy at times'])
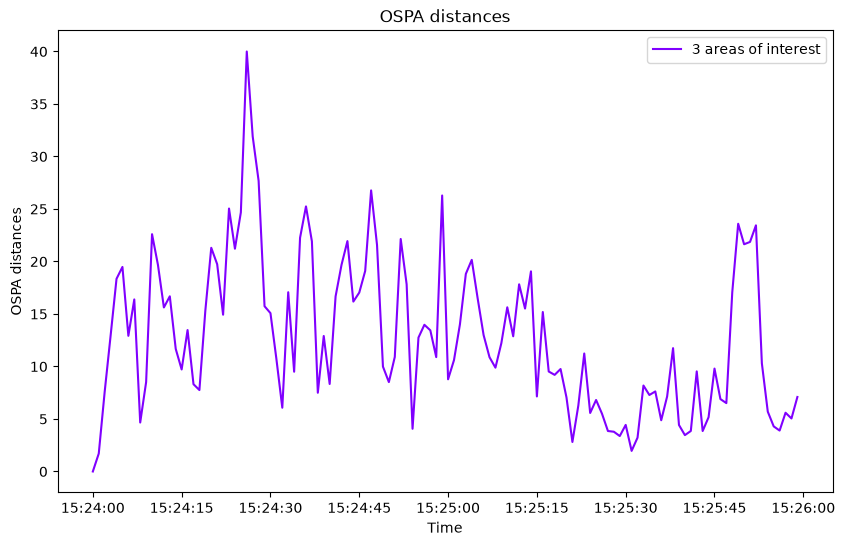
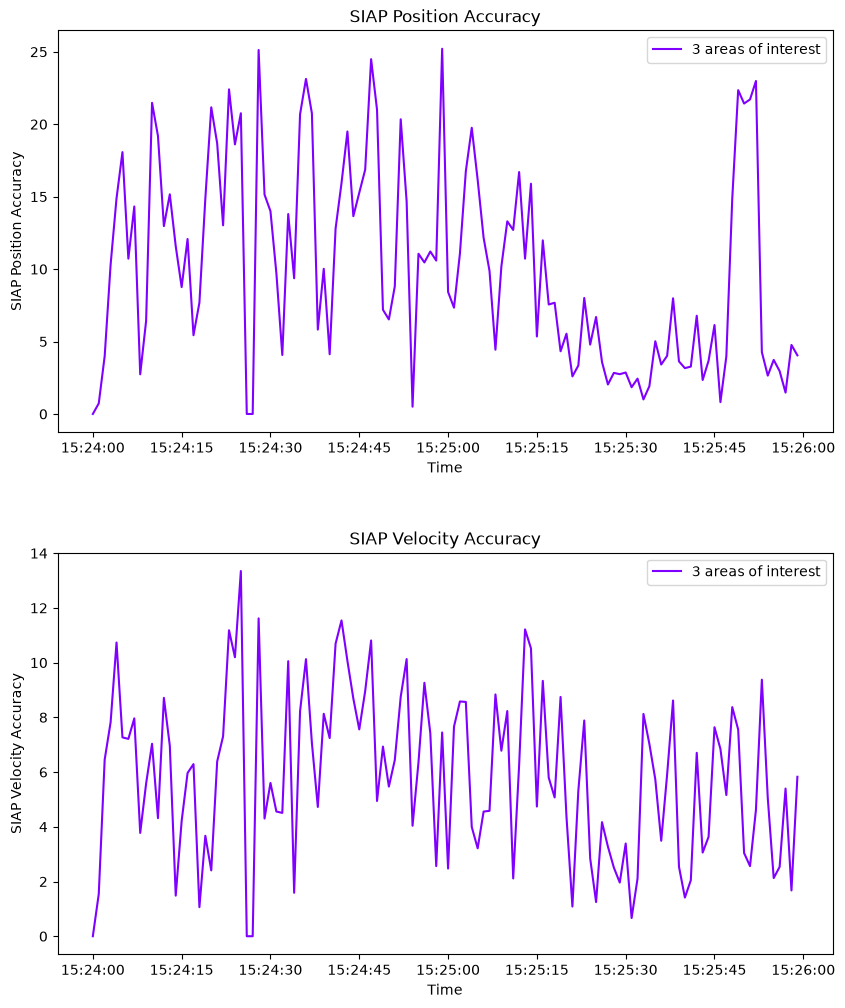
These metrics show a similar tracking performance across the simulation, even where track uncertainty is greater.
Total running time of the script: (0 minutes 31.000 seconds)