Note
Go to the end to download the full example code or to run this example in your browser via Binder
Sensor Platform Simulation
This example looks at how platforms and sensors can be used within the Stone Soup simulation capability.
Building a Simulated Sensor Platform
The focus of this example is to show how to set up and configure simulations. As such, the application of a tracker will not be covered in detail. For more information about trackers and how to configure them, review of the tutorials and demonstrations is recommended.
This example makes use of Stone Soup FixedPlatform and Sensor objects.
In order to configure platforms, sensors, and the simulation, we will need to import some specific Stone Soup objects. As these have been introduced in previous tutorials, they are imported upfront. New functionality within this example will be imported at the relevant point to draw attention to the new features.
# Some general imports and set up
from datetime import datetime
from datetime import timedelta
import numpy as np
# Stone Soup imports:
from stonesoup.types.state import State, GaussianState
from stonesoup.types.array import StateVector, CovarianceMatrix
from stonesoup.models.transition.linear import (
CombinedLinearGaussianTransitionModel, ConstantVelocity)
from stonesoup.models.measurement.nonlinear import CartesianToElevationBearingRange
from stonesoup.updater.kalman import UnscentedKalmanUpdater
from stonesoup.predictor.kalman import UnscentedKalmanPredictor
from stonesoup.deleter.time import UpdateTimeStepsDeleter
from stonesoup.tracker.simple import MultiTargetTracker
from matplotlib import pyplot as plt
# Define the simulation start time
start_time = datetime.now().replace(microsecond=0)
Create a Platform
The first element we need to create is a platform. For this first example, we will build a static (or fixed) platform which is located at the origin. We are going to work in a 6-dimensional state space, and our platform will have the following \(\mathbf{x}\).
Because the platform is static, we only need to define \((x, y, z)\). Any internal interactions within the platform which requires knowledge of platform velocity \((\dot{x}, \dot{y}, \dot{z})\) will be returned \((0, 0, 0)\).
# Firstly, import the fixed platform
from stonesoup.platform.base import FixedPlatform
# Define the initial platform position - in this case the origin
platform_state_vector = StateVector([[0], [0], [0]])
position_mapping = (0, 1, 2)
# Create the initial state (position, time)
platform_state = State(platform_state_vector, start_time)
# create our fixed platform
platform = FixedPlatform(states=platform_state,
position_mapping=position_mapping)
We have now created a platform within Stone Soup and located it at the origin of our state space. As previously stated, the platform will have a velocity \((\dot{x}, \dot{y}, \dot{z})\) of \((0, 0, 0)\) which we can check:
platform.velocity
StateVector([[0],
[0],
[0]])
We can also query the platform orientation:
platform.orientation
StateVector([[0],
[0],
[0]])
Create a Sensor
Now that we have a platform, the next step is to create a sensor which can be added to it. A radar will be created which is capable of measuring the range, bearing, and elevation of the target relative to the sensor.
The RadarRangeBearingElevation class provides a sensor wrapper around the
CartesianToElevationBearingRange measurement model. The measurement model provides a
time-invariant measurement model where measurements are assumed to be received in the form of
elevation (\(\theta\)), bearing (\(\phi\)), and range (\(r\)) with Gaussian noise in
each dimension.
The model is described by the following equation:
where \(\mathbf{z}_k\) is a measurement vector of the form:
and \(h\) is a non-linear model function of the form:
and \(\mathbf{z}_k\) is Gaussian distributed with covariance \(R\):
We now create our radar:
# Import a radar sensor model
from stonesoup.sensor.radar.radar import RadarElevationBearingRange
# First we need to configure a radar
# Generate a radar sensor with a suitable measurement accuracy
noise_covar = CovarianceMatrix(np.array(np.diag([np.deg2rad(3)**2,
np.deg2rad(0.15)**2,
25**2])))
# this radar measures range with an accuracy of +/- 25m, elevation accuracy +/- 3
# degrees, and bearing accuracy of +/- 0.15 degrees
# The radar needs to be informed of where x, y, and z are in the target state space
radar_mapping = (0, 2, 4)
# Instantiate the radar
radar = RadarElevationBearingRange(ndim_state=6,
position_mapping=radar_mapping,
noise_covar=noise_covar)
Attach the sensor to the platform
Now that we have created our radar sensor, we need to mount the sensor onto our platform.
Sensors can be mounted with two additional parameters: mounting offset and rotation offset.
The mounting offset:
defines how the sensors position is offset from the platform
defaults to a position offset of zero.
The rotation offset:
defines the sensor’s orientation relative to that of the platform
defaults to an orientation offset of zero.
The default assumption is that the sensor is located at the centre point of the platform and orientated to align with the platform body. Here, we are happy to use the default assumptions and therefore the sensor can be added.
platform.add_sensor(radar)
As before, we can query the platform to demonstrate that it has a sensor mounted:
You will notice that platform.sensors returns a list which contains our single sensor.
This hints at the multi-sensor platform functionality which is shown in a subsequent example.
We can also check that the default mounting offsets have been applied:
StateVector([[0],
[0],
[0]])
and that the rotation offsets have been applied:
StateVector([[0],
[0],
[0]])
Building a simulation
Now that we have created a sensor platform, we need to build a simulation which generates targets
for the sensor to detect and track. We are going to use a
MultiTargetGroundTruthSimulator. This simulator enables multiple ground truth targets
to be created based on a number of user-defined parameters.
In this example, targets are initiated with values based upon a mean state and a covariance,
using a Gaussian assumption. This is done by creating a GaussianState object which
describes the distribution which we want our targets to be drawn from. Targets will be generated
using the following parameters:
\(x\) is Gaussian-distributed around the platform location with variance of \(\mathrm{2}km\).
\(y\) is Gaussian-distributed around the platform location with variance of \(\mathrm{2}km\).
\(z\) is Gaussian-distributed around an altitude of \(\mathrm{9}km\) with variance of \(\mathrm{0.1}km\).
\(\dot{x}\) is Gaussian-distributed around \(\mathrm{100}ms^{-1}\) with variance of \(\mathrm{50}ms^{-1}\).
\(\dot{y}\) is Gaussian-distributed around \(\mathrm{100}ms^{-1}\) with variance of \(\mathrm{50}ms^{-1}\).
\(\dot{z}\) is Gaussian-distributed around \(\mathrm{0}ms^{-1}\) with variance of \(\mathrm{1}ms^{-1}\).
We will also configure our simulator to randomly create and delete targets based on a specified birth rate and death rate. We set the birth rate to be 0.10 - on any given time step there is a 10% chance of a new target being initiated. The death rate has been set to 0.01 - on any given time step, there is a 1% chance that a target will be removed from the simulation.
The above setup will provide a case which loosely approximates an air surveillance radar at an airport.
from stonesoup.simulator.simple import MultiTargetGroundTruthSimulator
# Set a constant velocity transition model for the targets
transition_model = CombinedLinearGaussianTransitionModel(
[ConstantVelocity(0.5), ConstantVelocity(0.5), ConstantVelocity(0.1)])
# Define the Gaussian State from which new targets are sampled on initialisation
initial_target_state = GaussianState(StateVector([[0], [0], [0], [0], [9000], [0]]),
CovarianceMatrix(np.diag([2000, 50, 2000, 50, 100, 1])))
groundtruth_sim = MultiTargetGroundTruthSimulator(
transition_model=transition_model, # target transition model
initial_state=initial_target_state, # add our initial state for targets
timestep=timedelta(seconds=1), # time between measurements
number_steps=120, # 2 minute
birth_rate=0.10, # 10% chance of a new target being born
death_probability=0.01 # 1% chance of a target being killed
)
With our ground truth simulation now set up, we need to add our platform into the simulation
capability. This is done using the PlatformDetectionSimulator class. This simulator
allows a list of platforms to be added into the simulation. When the simulation is processed,
the platforms are able to make detections of both the ground truth targets and other platforms.
In this case we have a single platform. Therefore, the radar sensor will only be able to make measurements of the ground truth objects generated by the simulator.
# Import the PlatformDetectionSimulator
from stonesoup.simulator.platform import PlatformDetectionSimulator
sim = PlatformDetectionSimulator(groundtruth=groundtruth_sim, platforms=[platform])
Creating the Tracker Components
As stated above, the aim of this example is to show how the Platform,
Sensor, and Simulator classes work within Stone Soup. We will therefore
quickly build an Unscented Kalman Filter which initiates measurements using a simple heuristic
initiation and deletes any track where no detection is associated for 2 consecutive time steps.
There are a number of tutorials for how to build the tracking components provided in the
Tutorials.
# Create an Unscented Kalman Predictor
predictor = UnscentedKalmanPredictor(transition_model)
# Create an Unscented Kalman Updater
# Note our sensor adds a measurement model to detections
updater = UnscentedKalmanUpdater(measurement_model=None)
When we build our updater, we do not provide a measurement model. This is because we have defined
a measurement model which is attached to our radar sensor. Each detection made by this sensor
will have our radar measurement model associated with it. In Stone Soup, the
Updater checks the detections provided and will use any measurement model attached
to them.
Setup Initiator class for the Tracker
We will now build a simple heuristic initiator. This assumes that most of the deviation is caused by the bearing measurement error. It converts the bearing error into \(x, y\) components using the target bearing. For z, we simply use \(r*\sigma_{\theta}^2\) (this ignores any bearing or range related components). Velocity covariances are just based on expected velocity range of targets.
from stonesoup.types.state import GaussianState
from stonesoup.types.update import GaussianStateUpdate
from stonesoup.initiator.simple import SimpleMeasurementInitiator
from stonesoup.types.track import Track
from stonesoup.types.hypothesis import SingleHypothesis
class Initiator(SimpleMeasurementInitiator):
def initiate(self, detections, timestamp, **kwargs):
max_dev = 500.
tracks = set()
measurement_model = self.measurement_model
for detection in detections:
state_vector = measurement_model.inverse_function(
detection)
model_covar = measurement_model.covar()
el_az_range = np.sqrt(np.diag(model_covar)) # elev, az, range
std_pos = detection.state_vector[2, 0]*el_az_range[1]
stdx = np.abs(std_pos*np.sin(el_az_range[1]))
stdy = np.abs(std_pos*np.cos(el_az_range[1]))
stdz = np.abs(detection.state_vector[2, 0]*el_az_range[0])
if stdx > max_dev:
print('Warning - X Deviation exceeds limit!!')
if stdy > max_dev:
print('Warning - Y Deviation exceeds limit!!')
if stdz > max_dev:
print('Warning - Z Deviation exceeds limit!!')
c0 = np.diag(np.array([stdx, 50.0, stdy, 50.0, stdz, 10.0])**2)
tracks.add(Track([GaussianStateUpdate(
state_vector,
c0,
SingleHypothesis(None, detection),
timestamp=detection.timestamp)
]))
return tracks
meas_model = CartesianToElevationBearingRange(
ndim_state=6,
mapping=np.array([0, 2, 4]),
noise_covar=noise_covar)
prior_state = GaussianState(
np.array([[0], [0], [0], [0], [0], [0]]),
np.diag([1000, 50, 1000, 50, 1000, 10.0])**2)
initiator = Initiator(prior_state, measurement_model=meas_model)
Now that we have set up out tracking scenario, we can wrap our simulation environment within a
MultiTargetTracker. This combines our tracker configurations with the simulation we
previously created into a single iterable object.
from stonesoup.hypothesiser.distance import DistanceHypothesiser
from stonesoup.measures import Mahalanobis
hypothesiser = DistanceHypothesiser(predictor, updater, measure=Mahalanobis(), missed_distance=3)
from stonesoup.dataassociator.neighbour import NearestNeighbour
data_associator = NearestNeighbour(hypothesiser)
deleter = UpdateTimeStepsDeleter(time_steps_since_update=2)
# Create a Kalman multi-target tracker
kalman_tracker = MultiTargetTracker(
initiator=initiator,
deleter=deleter,
detector=sim,
data_associator=data_associator,
updater=updater
)
The final step is to iterate our tracker over the simulation:
kalman_tracks = {} # Store for plotting later
groundtruth_paths = {} # Store for plotting later
detections = [] # Store for plotting later
for time, ctracks in kalman_tracker:
for track in ctracks:
loc = (track.state_vector[0], track.state_vector[2])
if track not in kalman_tracks:
kalman_tracks[track] = []
kalman_tracks[track].append(loc)
for truth in groundtruth_sim.current[1]:
loc = (truth.state_vector[0], truth.state_vector[2])
if truth not in groundtruth_paths:
groundtruth_paths[truth] = []
groundtruth_paths[truth].append(loc)
for detection in sim.detections:
detect_state = detection.measurement_model.inverse_function(detection)
loc = (detect_state[0], detect_state[2])
detections.append(loc)
Warning - Z Deviation exceeds limit!!
Warning - Z Deviation exceeds limit!!
Warning - Z Deviation exceeds limit!!
Warning - Z Deviation exceeds limit!!
Warning - Z Deviation exceeds limit!!
Warning - Z Deviation exceeds limit!!
Warning - Z Deviation exceeds limit!!
Warning - Z Deviation exceeds limit!!
Warning - Z Deviation exceeds limit!!
Warning - Z Deviation exceeds limit!!
Warning - Z Deviation exceeds limit!!
Warning - Z Deviation exceeds limit!!
Warning - Z Deviation exceeds limit!!
Warning - Z Deviation exceeds limit!!
Warning - Z Deviation exceeds limit!!
Warning - Z Deviation exceeds limit!!
Warning - Z Deviation exceeds limit!!
Warning - Z Deviation exceeds limit!!
Warning - Z Deviation exceeds limit!!
Plotting the outputs
First we will plot the ground truth paths (red) which have been generated in the simulation step:
fig = plt.figure(figsize=(10, 6))
ax = fig.add_subplot(1, 1, 1)
ax.set_xlabel("$East$")
ax.set_ylabel("$North$")
ax.set_ylim(-10000, 10000)
ax.set_xlim(-10000, 10000)
for key in groundtruth_paths:
X = [coord[0] for coord in groundtruth_paths[key]]
Y = [coord[1] for coord in groundtruth_paths[key]]
ax.plot(X, Y, color='r') # Plot true locations in red
# plot platform location
ax.scatter(0, 0, color='y')

<matplotlib.collections.PathCollection object at 0x7f14cab14f20>
If we overlay the detections (black) onto the ground truth paths (red), we can see how the
sensor performs, generating detections based upon the MeasurementModel we provided it
with. The platform location is shown in yellow:
fig = plt.figure(figsize=(10, 6))
ax = fig.add_subplot(1, 1, 1)
ax.set_xlabel("$East$")
ax.set_ylabel("$North$")
ax.set_ylim(-10000, 10000)
ax.set_xlim(-10000, 10000)
for key in groundtruth_paths:
X = [coord[0] for coord in groundtruth_paths[key]]
Y = [coord[1] for coord in groundtruth_paths[key]]
ax.plot(X, Y, color='r') # plot true locations in red
X = [coord[0] for coord in detections]
Y = [coord[1] for coord in detections]
ax.scatter(X, Y, color='k') # plot detections in black
# plot platform location
ax.scatter(0, 0, color='y')

<matplotlib.collections.PathCollection object at 0x7f14c9284b00>
Now, we overlay the ground truth locations (red), detections (black) and tracks (blue). This shows all the stages of the tracker simulation we have built in a single figure. The platform location is shown in yellow:
fig = plt.figure(figsize=(10, 6))
ax = fig.add_subplot(1, 1, 1)
ax.set_xlabel("$East$")
ax.set_ylabel("$North$")
ax.set_ylim(-10000, 10000)
ax.set_xlim(-10000, 10000)
for key in groundtruth_paths:
X = [coord[0] for coord in groundtruth_paths[key]]
Y = [coord[1] for coord in groundtruth_paths[key]]
ax.plot(X, Y, color='r') # Plot true locations in red
for key in kalman_tracks:
X = [coord[0] for coord in kalman_tracks[key]]
Y = [coord[1] for coord in kalman_tracks[key]]
ax.plot(X, Y, color='b') # Plot track estimates in blue
X = [coord[0] for coord in detections]
Y = [coord[1] for coord in detections]
ax.scatter(X, Y, color='k') # Plot detections in black
# plot platform location
ax.scatter(0, 0, color='y')
<matplotlib.collections.PathCollection object at 0x7f14c920e2d0>
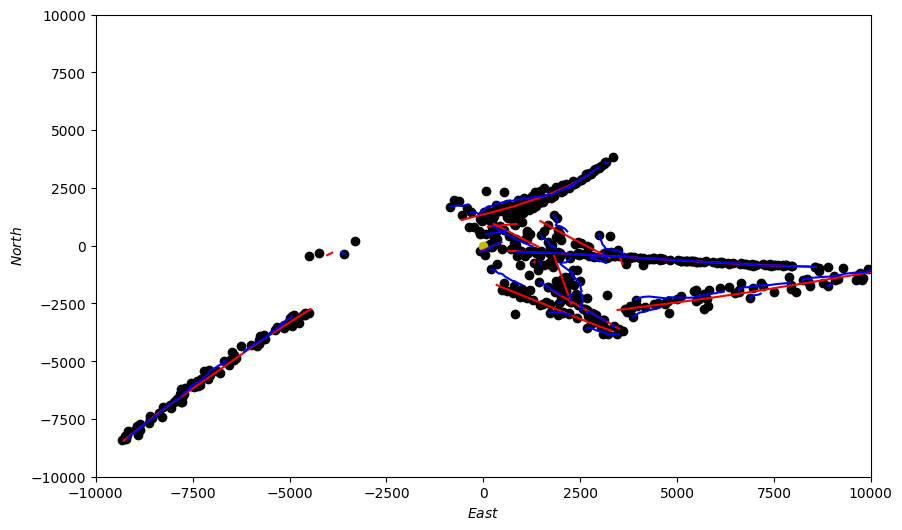
Finally, we can plot the estimated tracks (blue) alongside the ground truth paths (red). Because we used a noisy sensor, this view makes it easier to quickly see the tracker performance. The platform location is shown in yellow.
fig = plt.figure(figsize=(10, 6))
ax = fig.add_subplot(1, 1, 1)
ax.set_xlabel("$East$")
ax.set_ylabel("$North$")
ax.set_ylim(-10000, 10000)
ax.set_xlim(-10000, 10000)
for key in groundtruth_paths:
X = [coord[0] for coord in groundtruth_paths[key]]
Y = [coord[1] for coord in groundtruth_paths[key]]
ax.plot(X, Y, color='r') # Plot true locations in red
for key in kalman_tracks:
X = [coord[0] for coord in kalman_tracks[key]]
Y = [coord[1] for coord in kalman_tracks[key]]
ax.plot(X, Y, color='b') # Plot track estimates in blue
# plot platform location
ax.scatter(0, 0, color='y')

<matplotlib.collections.PathCollection object at 0x7f14c91baf30>
To familiarise yourself with sensors, it is recommended that you investigate changing the
parameters within the sensor Measurement Model to see the impact on detections and ultimately
tracker performance. We used a hard association logic coupled with a relatively noisy sensor.
A suggested further exercise is to modify this example to use a soft association step such
as Probabilistic Data Association (PDA) or Joint Probabilistic Data Association
(JPDA).
Key points
1. Sensor platforms, which combine Sensor and Platform classes can be
created in Stone Soup and used as part of a tracking simulation.
2. When using a Sensor to generate detections, there is no need to provide an
Updater with a MeasurementModel as each detection is attributed with the
relevant sensors measurement model.
3. Sensors will generate detections of all platforms within the simulation, not just ground
truth objects.
Total running time of the script: (0 minutes 9.772 seconds)