Note
Go to the end to download the full example code or to run this example in your browser via Binder.
Metrics example
This example demonstrates different metrics available in Stone Soup and how they
can be used with the MultiManager to assess tracking performance. It also
demonstrates how to use the MetricPlotter class to easily generate metric plots for
visualisation.
- To generate metrics, we need:
At least one
MetricGenerator- these are used to determine the metric type we want to generate and to compute the metrics themselves.The
MultiManagermetric manager - this is used to hold the metric generator(s) as well as all the ground truth, track, and detection sets we want to generate our metrics from. We will generate our metrics using thegenerate_metrics()method of theMultiManagerclass.
In this example, we will create a variety of metric generators for different types of metrics. These metrics will be used to assess and compare tracks produced from the same set of ground truth paths and detections by the Extended Kalman Filter and the Particle Filter.
Create metric generators and metric manager
In this section we create the metric generators in preparation for generating metrics later.
First, we create some BasicMetrics generators that will show us the number of tracks,
the number of targets, and the ratio between them. As with all the metric generators,
we must give ours a unique name to identify it later, and the keys for our tracks and
ground truth data (and detections set if relevant). When we generate the metrics, these keys
will be used to access the data stored in the MultiManager and allow us to specify
which tracks or truths we want to generate metrics for.
NB: in all metrics that take a track and a truth as input, we can input two tracks instead to calculate track to track comparisons. This is relevant in scenarios where a second set of tracks is used as a proxy for ground truth. To do this, set the tracks_key parameter to the tracks set and the truths_key parameter to the second tracks set that is being used as a ground truth proxy.
from stonesoup.metricgenerator.basicmetrics import BasicMetrics
basic_EKF = BasicMetrics(generator_name='basic_EKF', tracks_key='EKF_tracks', truths_key='truths')
basic_PF = BasicMetrics(generator_name='basic_PF', tracks_key='PF_tracks', truths_key='truths')
Next, we create the Optimal SubPattern Assignment (OSPA) metric generator. This metric is calculated at each time step to show how far the tracks are from the ground truth paths. It returns an overall multi-track to multi-ground-truth missed distance for each time step.
The generator has two additional properties: \(p \in [1,\infty]\) for outlier sensitivity and \(c > 1\) for cardinality penalty. [1]
from stonesoup.metricgenerator.ospametric import OSPAMetric
ospa_EKF_truth = OSPAMetric(c=40, p=1, generator_name='OSPA_EKF-truth',
tracks_key='EKF_tracks', truths_key='truths')
ospa_PF_truth = OSPAMetric(c=40, p=1, generator_name='OSPA_PF-truth',
tracks_key='PF_tracks', truths_key='truths')
ospa_EKF_PF = OSPAMetric(c=40, p=1, generator_name='OSPA_EKF-PF',
tracks_key='EKF_tracks', truths_key='PF_tracks')
Next, we create the Single Integrated Air Picture (SIAP) metric generators. These metrics are applicable to tracking in general - not just the air domain. [2]
The SIAP generators will generate a series of different SIAP metrics that provide information about the accuracy of the tracking. They generate different SIAP metrics for each time step and calculate averages. SIAP metric averages and more explanation into the different plotted metrics are provided later.
The SIAP Metrics require a way to associate tracks to truth, so we’ll use a Track to Truth associator which uses Euclidean distance measure by default.
from stonesoup.metricgenerator.tracktotruthmetrics import SIAPMetrics
from stonesoup.measures import Euclidean
siap_EKF_truth = SIAPMetrics(position_measure=Euclidean((0, 2)),
velocity_measure=Euclidean((1, 3)),
generator_name='SIAP_EKF-truth',
tracks_key='EKF_tracks',
truths_key='truths'
)
siap_PF_truth = SIAPMetrics(position_measure=Euclidean((0, 2)),
velocity_measure=Euclidean((1, 3)),
generator_name='SIAP_PF-truth',
tracks_key='PF_tracks',
truths_key='truths'
)
from stonesoup.dataassociator.tracktotrack import TrackToTruth
associator = TrackToTruth(association_threshold=30)
Next, we create metric generators for the SumofCovarianceNormsMetric. They will
calculate the sum of the covariance matrix norms of each track state at each time step. These
metrics produced will indicate how uncertain the tracks we have produced are. Higher sum of
covariance norms means higher uncertainty.
from stonesoup.metricgenerator.uncertaintymetric import SumofCovarianceNormsMetric
sum_cov_norms_EKF = SumofCovarianceNormsMetric(tracks_key='EKF_tracks',
generator_name='sum_cov_norms_EKF')
sum_cov_norms_PF = SumofCovarianceNormsMetric(tracks_key='PF_tracks',
generator_name='sum_cov_norms_PF')
Finally, we create two plot generators - one for each of the two different trackers we are using. These will take in the tracks, ground truths, and detections that we generate and plot them in 2 dimensions.
from stonesoup.metricgenerator.plotter import TwoDPlotter
plot_generator_EKF = TwoDPlotter([0, 2], [0, 2], [0, 2], uncertainty=True, tracks_key='EKF_tracks',
truths_key='truths', detections_key='detections',
generator_name='EKF_plot')
plot_generator_PF = TwoDPlotter([0, 2], [0, 2], [0, 2], uncertainty=True, tracks_key='PF_tracks',
truths_key='truths', detections_key='detections',
generator_name='PF_plot')
Add our metric generators to the MultiManager:
from stonesoup.metricgenerator.manager import MultiManager
metric_manager = MultiManager([basic_EKF,
basic_PF,
ospa_EKF_truth,
ospa_PF_truth,
ospa_EKF_PF,
siap_EKF_truth,
siap_PF_truth,
sum_cov_norms_EKF,
sum_cov_norms_PF,
plot_generator_EKF,
plot_generator_PF
], associator) # associator for generating SIAP metrics
Generate ground truth and detections
In this section, we generate the ground truth paths and the detections to be tracked - we will simulate targets that can turn left or right. Both our Extended Kalman Filter tracker and Particle Filter tracker will be given the same sets of truths and detections to track, so we can fairly compare the results.
import numpy as np
import datetime
from stonesoup.types.array import StateVector, CovarianceMatrix
from stonesoup.types.state import State, GaussianState
start_time = datetime.datetime.now()
np.random.seed(8)
initial_state_mean = StateVector([[0], [0], [0], [0]])
initial_state_covariance = CovarianceMatrix(np.diag([4, 0.5, 4, 0.5]))
timestep_size = datetime.timedelta(seconds=5)
number_steps = 20
initial_state = GaussianState(initial_state_mean, initial_state_covariance)
from stonesoup.models.transition.linear import \
CombinedLinearGaussianTransitionModel, ConstantVelocity, KnownTurnRate
# initialise the transition models the ground truth can use
constant_velocity = CombinedLinearGaussianTransitionModel(
[ConstantVelocity(0.05), ConstantVelocity(0.05)])
turn_left = KnownTurnRate([0.05, 0.05], np.radians(20))
turn_right = KnownTurnRate([0.05, 0.05], np.radians(-20))
# create a probability matrix - how likely the ground truth will use each transition model,
# given its current model
model_probs = np.array([[0.7, 0.15, 0.15], # keep straight, turn left, turn right
[0.4, 0.6, 0.0], # go straight, keep turning left, turn right
[0.4, 0.0, 0.6]]) # go straight, turn left, keep turning right
from stonesoup.simulator.simple import SwitchMultiTargetGroundTruthSimulator
from stonesoup.types.state import GaussianState
# generate truths
n_truths = 3
xmin = 0
xmax = 40
ymin = 0
ymax = 40
preexisting_states = []
for i in range(0, n_truths):
x = np.random.randint(xmin, xmax) - 1 # x position of initial state
y = np.random.randint(ymin, ymax) - 1 # y position of initial state
x_vel = np.random.randint(-20, 20) / 10 # x velocity will start between -2 and 2
y_vel = np.random.randint(-20, 20) / 10 # y velocity will start between -2 and 2
preexisting_states.append(StateVector([x, x_vel, y, y_vel]))
ground_truth_gen = SwitchMultiTargetGroundTruthSimulator(
initial_state=initial_state,
transition_models=[constant_velocity, turn_left, turn_right],
model_probs=model_probs, # put in matrix from above
number_steps=number_steps, # how long we want each track to be
birth_rate=0,
death_probability=0,
preexisting_states=preexisting_states
)
Next, we create a sensor and use it to generate detections from the targets. In this example, we use a radar with imperfect measurements in bearing-range space.
from stonesoup.sensor.radar import RadarBearingRange
# Create the sensor
sensor = RadarBearingRange(
ndim_state=4,
position_mapping=[0, 2], # Detecting x and y
noise_covar=np.diag([np.radians(0.2), 0.2]), # Radar doesn't take perfect measurements
clutter_model=None, # Can add clutter model in future if desired
)
from stonesoup.platform import FixedPlatform
platform = FixedPlatform(State(StateVector([20, 0, 0, 0])), position_mapping=[0, 2],
sensors=[sensor])
# create identical detection sets for each tracker to use
from itertools import tee
from stonesoup.simulator.platform import PlatformDetectionSimulator
detector = PlatformDetectionSimulator(ground_truth_gen, platforms=[platform])
detector, *detectors = tee(detector, 3)
Plot the ground truth paths and detections:
detections = set()
truths = set()
for time, detects in detector:
detections |= detects
truths |= ground_truth_gen.groundtruth_paths
from stonesoup.plotter import Plotterly
plotter = Plotterly()
plotter.plot_ground_truths(truths, [0, 2])
plotter.plot_measurements(detections, [0, 2])
plotter.plot_sensors(sensor)
plotter.fig
Create and run the trackers
We now create and run the two trackers: one with the Extended Kalman Filter (EKF) and the other with the Particle Filter (PF). We start with the EKF tracker.
from stonesoup.predictor.kalman import ExtendedKalmanPredictor
from stonesoup.updater.kalman import ExtendedKalmanUpdater
transition_model_estimate = CombinedLinearGaussianTransitionModel([ConstantVelocity(0.5),
ConstantVelocity(0.5)])
predictor_EKF = ExtendedKalmanPredictor(transition_model_estimate)
updater_EKF = ExtendedKalmanUpdater(sensor)
from stonesoup.hypothesiser.distance import DistanceHypothesiser
from stonesoup.measures import Mahalanobis
hypothesiser_EKF = DistanceHypothesiser(predictor_EKF, updater_EKF,
measure=Mahalanobis(), missed_distance=4)
from stonesoup.dataassociator.neighbour import GNNWith2DAssignment
data_associator_EKF = GNNWith2DAssignment(hypothesiser_EKF)
from stonesoup.deleter.time import UpdateTimeDeleter
deleter = UpdateTimeDeleter(datetime.timedelta(seconds=5), delete_last_pred=True)
init_transition_model = CombinedLinearGaussianTransitionModel(
(ConstantVelocity(1), ConstantVelocity(1)))
init_predictor_EKF = ExtendedKalmanPredictor(init_transition_model)
from stonesoup.initiator.simple import MultiMeasurementInitiator
initiator_EKF = MultiMeasurementInitiator(
GaussianState(
np.array([[20], [0], [10], [0]]), # Prior State
np.diag([1, 1, 1, 1])),
measurement_model=None,
deleter=deleter,
data_associator=GNNWith2DAssignment(
DistanceHypothesiser(init_predictor_EKF, updater_EKF, Mahalanobis(), missed_distance=5)),
updater=updater_EKF,
min_points=2
)
from stonesoup.tracker.simple import MultiTargetTracker
kalman_tracker_EKF = MultiTargetTracker( # Run the tracker
initiator=initiator_EKF,
deleter=deleter,
detector=detectors[0],
data_associator=data_associator_EKF,
updater=updater_EKF
)
Run the tracker with the Particle Filter:
from stonesoup.predictor.particle import ParticlePredictor
from stonesoup.resampler.particle import ESSResampler
resampler = ESSResampler()
from stonesoup.updater.particle import ParticleUpdater
predictor_PF = ParticlePredictor(transition_model_estimate)
updater_PF = ParticleUpdater(measurement_model=None, resampler=resampler)
hypothesiser_PF = DistanceHypothesiser(predictor_PF, updater_PF,
measure=Mahalanobis(), missed_distance=4)
data_associator_PF = GNNWith2DAssignment(hypothesiser_PF)
from stonesoup.initiator.simple import GaussianParticleInitiator
from stonesoup.types.state import GaussianState
from stonesoup.initiator.simple import SimpleMeasurementInitiator
prior_state = GaussianState(
StateVector([20, 0, 10, 0]),
np.diag([1, 1, 1, 1]) ** 2)
initiator_Part = SimpleMeasurementInitiator(prior_state, measurement_model=None,
skip_non_reversible=True)
initiator_PF = GaussianParticleInitiator(number_particles=2000,
initiator=initiator_Part,
use_fixed_covar=False)
tracker_PF = MultiTargetTracker(
initiator=initiator_PF,
deleter=deleter,
detector=detectors[1],
data_associator=data_associator_PF,
updater=updater_PF,
)
Add data to metric manager and generate metrics
Now that we have all of our ground truth, detections, and tracks data, we can add it to the metric manager.
The MultiManager add_data() method takes a dictionary of lists/sets of
ground truth, detections, and/or tracks data. It can take multiple sets of each type. Each
state set must have a unique key assigned to it. The track, truth, and detection keys that we
input into the metric generators will be used to extract the corresponding set from the
MultiManager for metric generation.
Setting overwrite to False allows new data to be added to the MultiManager
without overwriting existing data, as demonstrated in the code below:
# add tracks data to metric manager
for step, (time, current_tracks) in enumerate(kalman_tracker_EKF, 1):
metric_manager.add_data({'EKF_tracks': current_tracks}, overwrite=False)
for step, (time, current_tracks) in enumerate(tracker_PF, 1):
metric_manager.add_data({'PF_tracks': current_tracks}, overwrite=False)
# add truths and detections
metric_manager.add_data({'truths': truths,
'detections': detections}, overwrite=False)
Generate metrics
We are now ready to generate and view all the metrics from our MultiManager.
Because we have two TwoDPlotter generators in our metric manager, two plots will be
displayed when we generate the metrics. They will show the ground truth paths,
detections, and tracks. One will display the tracks produced by the EKF tracker and the other
will display the tracks from the PF tracker.
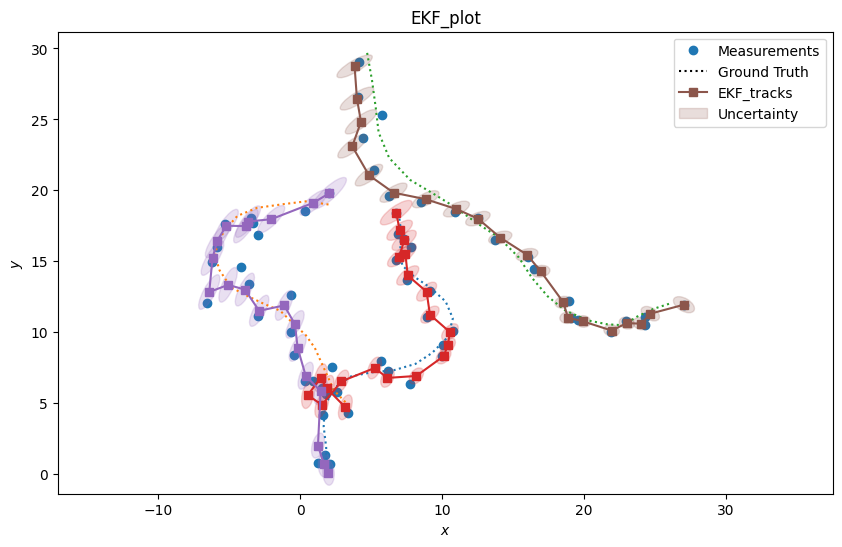
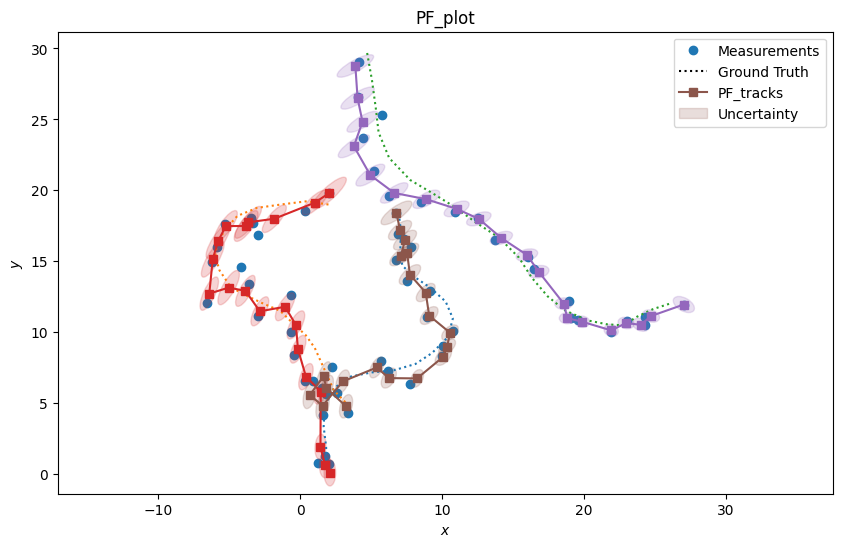
We can see from the plots above that the two trackers exhibit similar performance in tracking the ground truths.
Let’s look at the metrics we’ve generated to compare them further. We’ll start by printing out the basic metrics which give us information on the number of tracks vs targets.
for generator in metrics.keys():
if 'basic' in generator:
print(f'\n{generator}:')
for metric_key, metric in metrics[generator].items():
print(f"{metric.title}: {metric.value}")
basic_EKF:
Number of targets: 3
Number of tracks: 3
Track-to-target ratio: 1.0
basic_PF:
Number of targets: 3
Number of tracks: 3
Track-to-target ratio: 1.0
The basic metrics show that both the EKF and the PF have successfully produced tracks for each of the ground truth paths so have a 1:1 track-to-target ratio.
Next, we’ll look at the averages of each of the SIAP metrics to compare.
First, we extract the SIAP averages from the MultiManager. Then, we use the
SIAPTableGenerator to display the average metrics in a table which shows us
descriptions for each metric.
We first create a table for the EKF SIAPs:
from stonesoup.metricgenerator.metrictables import SIAPTableGenerator
siap_metrics = metrics['SIAP_EKF-truth']
siap_averages_EKF = {siap_metrics.get(metric) for metric in siap_metrics
if metric.startswith("SIAP") and not metric.endswith(" at times")}
siap_table = SIAPTableGenerator(siap_averages_EKF).compute_metric()
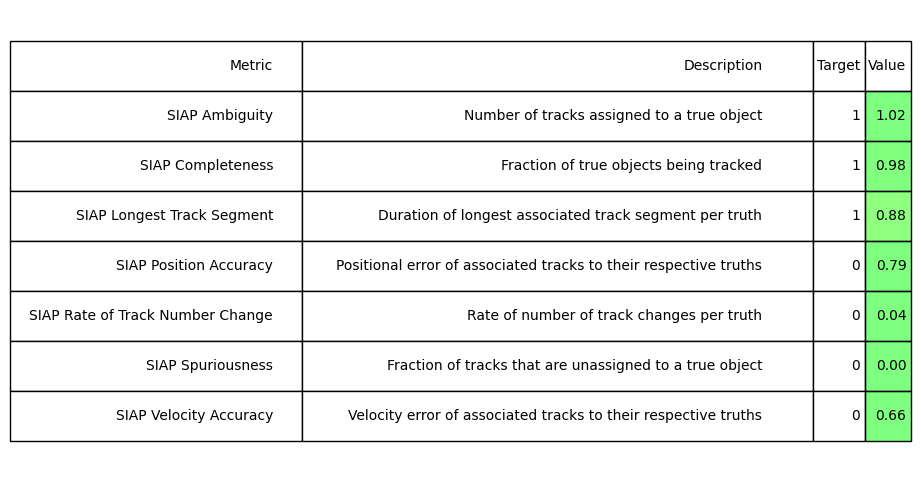
Now we produce a table for the PF SIAPs for comparison:
siap_metrics = metrics['SIAP_PF-truth']
siap_averages_PF = {siap_metrics.get(metric) for metric in siap_metrics
if metric.startswith("SIAP") and not metric.endswith(" at times")}
siap_table = SIAPTableGenerator(siap_averages_PF).compute_metric()

We can see that the values for most of the SIAP metric averages are similar between the trackers, again showing their tracking quality is very similar. Other specific observations include:
SIAP Ambiguity of just above 1 indicates that there are places where multiple tracks overlap the same section of ground truth path, which we can see is the case from the plots above.
The Longest Track Segment (0.88) indicates that, on average, the three different tracks produced are not following 100% of the ground truth paths. We can see on the lower left area of our plots that the tracks have been confused.
Positional and velocity errors of ~0.80 and 0.66 indicate that there is some distance between the tracks and ground truth paths. Again, we can see this from the plots. The range for these errors is 0-infinity so the errors are not significant.
SIAP Spuriousness of 0 show us no tracks have been created that are not associated to a true object. We might get higher spuriousness if we added clutter to our detections.
Plot metrics
We will use MetricPlotter to plot some of our metrics below.
To use MetricPlotter, we first create an instance of the class. We then use the
plot_metrics() method to plot the metrics of our choice. Key features of
MetricPlotter include:
You can specify exactly which metrics you want to plot by specifying the optional generator_names and metric_names parameters.
generator_names allows you to specify which generators you want to plot metrics from. If you don’t pass the generator_names argument,
plot_metrics()will automatically extract all plottable metrics from all metric generators in theMultiManagerand plot them.metric_names allows you to specify which specific metrics types to plot from the metric generators. This is mostly relevant for the SIAP metrics. You can view which metrics are plottable with
MetricPlotter.plottable_metrics().plot_metrics()has a combine_plots argument which defaults toTrue. This means that all metrics of the same type will be plotted together on a single subplot.You can specify additional formatting, like colour and linestyle, for the plots produced by using keyword arguments from matplotlib pyplot.
We start by plotting the OSPA distances and SIAP metrics. Plots will be combined for the same metric type.
from stonesoup.plotter import MetricPlotter
graph = MetricPlotter()
graph.plot_metrics(metrics, generator_names=['OSPA_EKF-truth',
'OSPA_PF-truth',
'OSPA_EKF-PF',
'SIAP_EKF-truth',
'SIAP_PF-truth'],
# metric_names=['OSPA distances',
# 'SIAP Position Accuracy at times']
# uncomment and run to see effect
color=['orange', 'green', 'blue'])
# update y-axis label and title; other subplots are displaying auto-generated title and labels
graph.axes[0].set(ylabel='OSPA metrics', title='OSPA distances over time')
graph.fig.show()
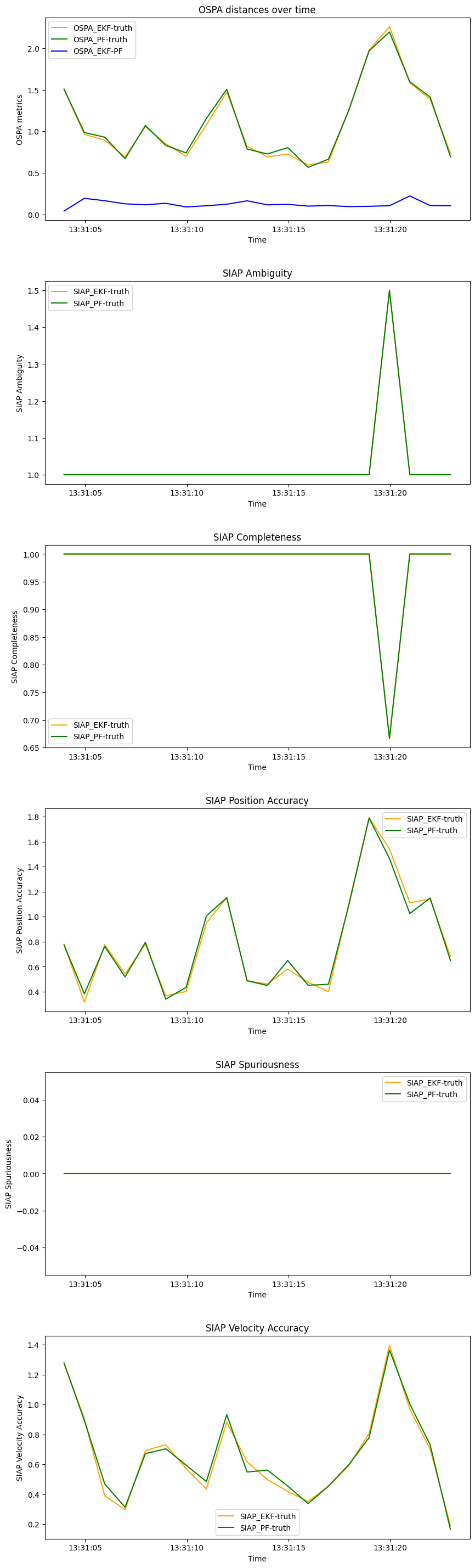
From these plots, we can see that we lose some track accuracy towards the end of the simulation. We can once again see how similar the tracking performance is across both trackers. The blue line in the OSPA distances plot indicates the distance between tracks produced by both trackers at each time step.
We now plot the sum of covariance norms metrics for both trackers. We plot the metrics separately and specify additional keyword arguments to customise the plot.
graph = MetricPlotter()
graph.plot_metrics(metrics, generator_names=['sum_cov_norms_EKF',
'sum_cov_norms_PF'],
combine_plots=False,
color='purple', linestyle='--')
graph.set_fig_title('Sum of Covariance Norms Metric') # set figure title
graph.set_ax_title(['Extended Kalman Filter', 'Particle Filter']) # set title for each axis

For both trackers, we start with the highest uncertainty as tracks are initiated. Uncertainty decreases until just past the middle of our timeframe and begins to increase again as time increases.
You can change the parameters in the ground truth and trackers and see how it affects the different metrics.
Footnotes
Total running time of the script: (0 minutes 5.496 seconds)